
Transportist: Flow, Flux, Density and Spissitude
Flow and Flux
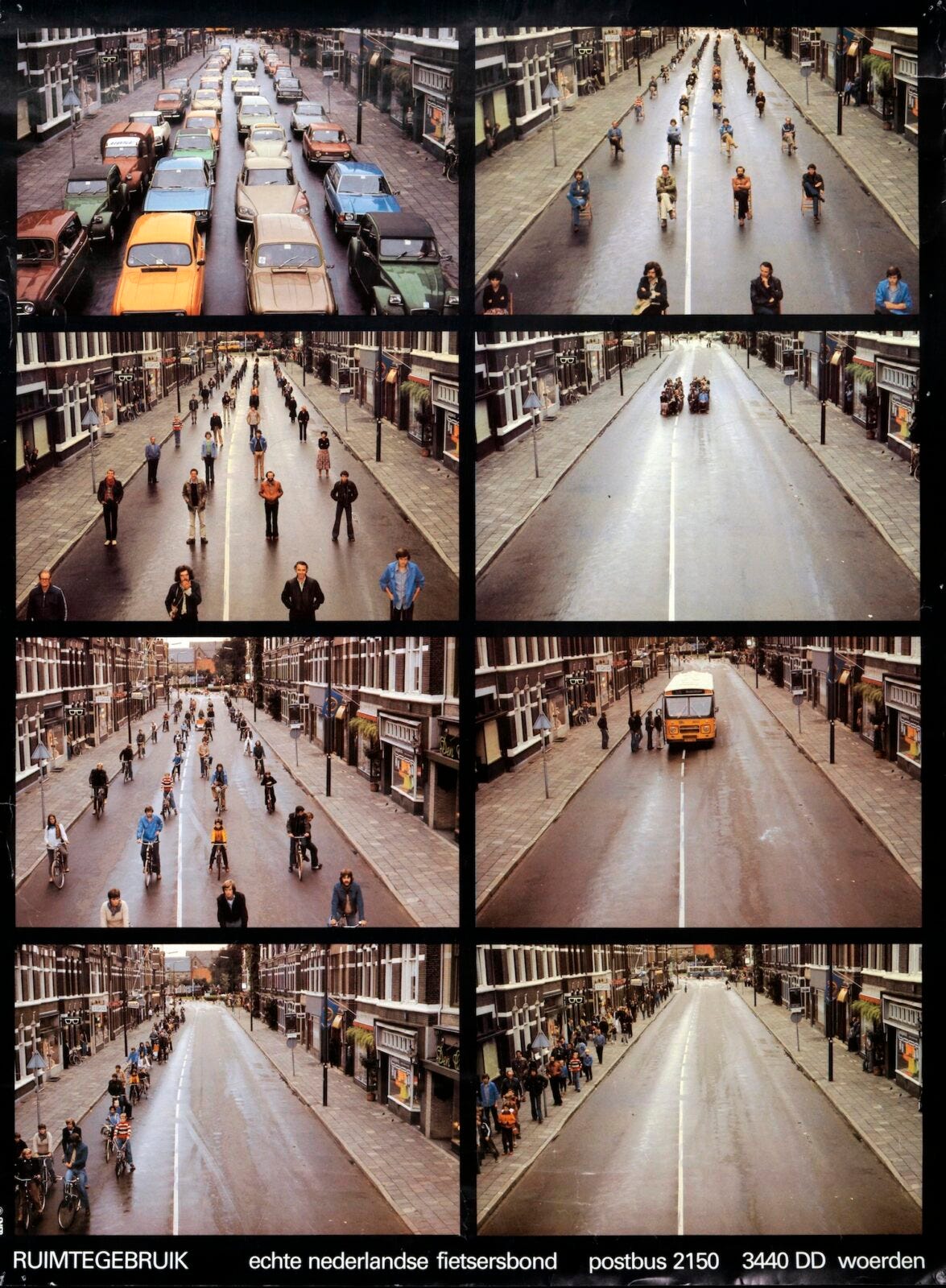
A while back, in one of my more popular posts, I noted the subtle distinction between flow1 and flux in traffic. The flow is vehicles (or people) per unit time, past a point in space. For instance, vehicles per hour on a section, or vehicles per hour per lane. The flux controls for the width of the place they are crossing (vehicles per hour per meter). The reason this matters is that some things we would like to track are wider than others. The width of person or a bicycle is narrower than a typical automobile or truck. So a bike lane with 1800 bicycles per hour is more productive than a typical motor vehicle lane with 1800 single occupant vehicles per hour. Similarly, we might be interested in the flux (rather than the lane flow) in lane-free traffic, as presently seen in developing countries prior to the introduction of western traffic engineering practice.
The fundamental relationship between traffic parameters is traditionally given as:
Q = K * V
where Q is typically flow (vehicles per hour), K is density (Koncentration) (vehicles per km), and V is speed (Velocity) (km/hour). It may be measured for a road segment for a lane.
Density and Spissitude
So if we have flow and flux, we should also have a more spatially-discrete analog for traffic density (K) than the simple `lane’. I suggest that the number of people or vehicles per square meter might be the appropriate metric. But we cannot simply use the term density, since that is taken, and would cause confusion due to decades of misuse. We can borrow the admittedly ugly word Spissitude, which means density or thickness for a material that is neither solid nor liquid, but rather a liquid becoming a solid (just as traffic congests).2 Like flow, flux, density, and velocity, it has a nice Latin etymology.
This implies
Q_flux = K_spissitude * V
Vehicles/hour/meter of width = Vehicles / m^2 * m/hour
Occupancy
Density is usually not directly measured, instead Occupancy is. Occupancy is the percentage of time that a magnetic loop detector embedded on the road is occupied. It is converted to density after accounting for average vehicle length (and its magnetic profile). Instead of the percentage of the lane that is occupied, we should to measure the percentage of the area that is occupied. This requires different instruments than loop detectors (or at least different ways of analysing the magnetic signal profile. Over the road space, we can see that the potential occupancy varies by vehicle size and type. Cars often have both larger lateral and sequential gaps between them than bikes or pedestrians at the same speed.
Keep reading with a 7-day free trial
Subscribe to Transportist to keep reading this post and get 7 days of free access to the full post archives.