A Stochastic Delay Model for Signal-free Intersections
Recently published:
Soltani, A, Ramezani, M. and Levinson, D.M. (2026) A stochastic delay model for signal-free intersections. Transportation Research part C. October 2026, 105813, Volume 191. [doi]
Highlights
Stochastic conflict-probability model estimates delay at signal-free intersections without fixed priority hierarchies assumption.
Binary service time distribution links conflict probability to M/M/1 and M/G/1 queueing delay formulations.
Validated using real data across intersections, roundabouts, and merging sections with significant improvement over HCM.
Extended to autonomous vehicle coordination under FCFS and CfDCA protocols.
Dynamic parameter evolution accommodates time-varying demand through quasi-steady-state regime switching.
Abstract
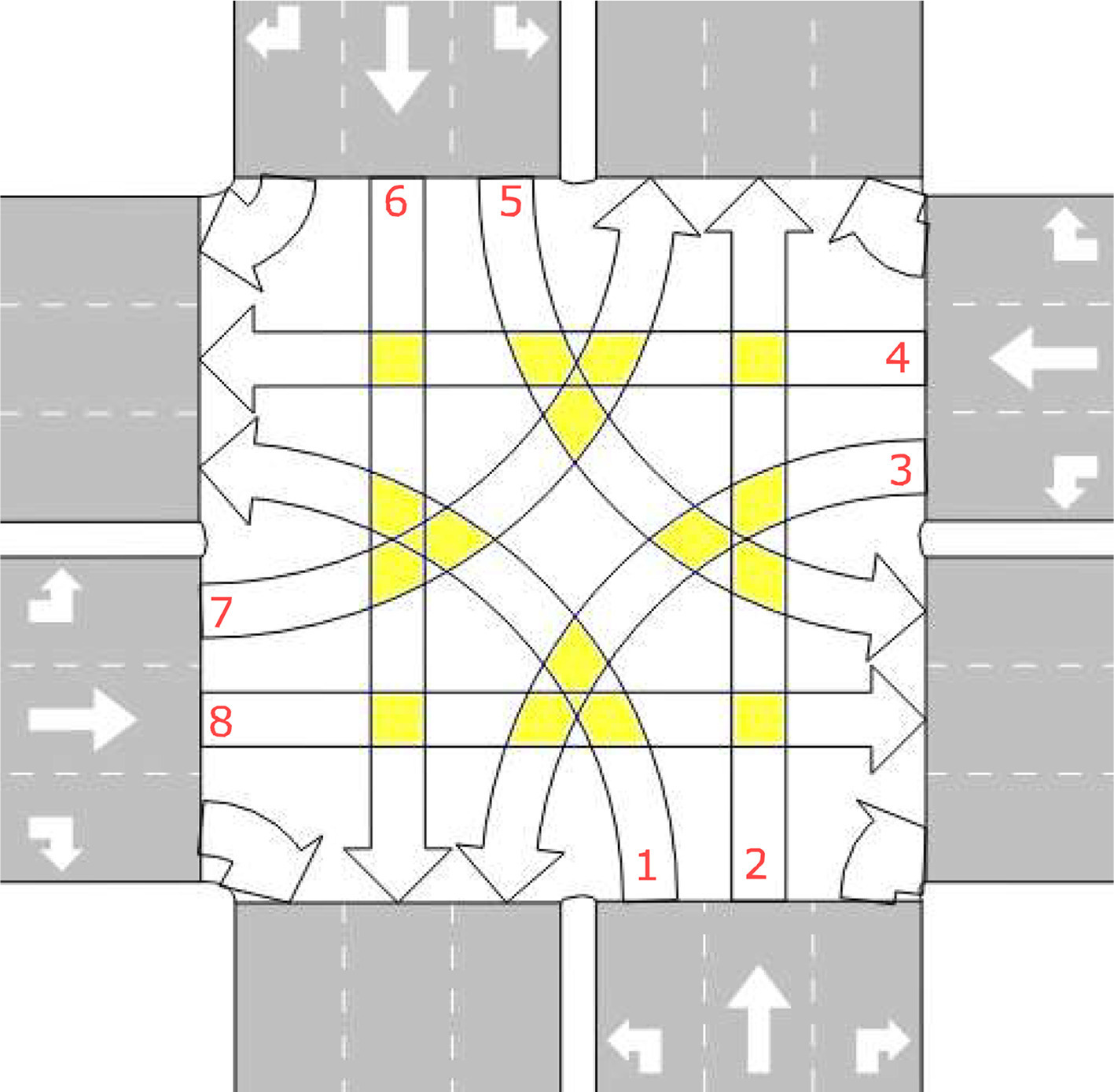
This study presents a stochastic delay model that treats signal-free intersections as systems of servers where the probability of conflict between vehicles determines delay. Rather than relying on predetermined major-minor hierarchies, the model builds on interaction between any two approaching vehicles attempting to occupy the same conflict zone simultaneously. This conflict-probability framework applies across many traffic scenarios, from traditional unsignalized multi-modal intersections, merging sections, and roundabouts to signal-free intersections for autonomous vehicles (AVs). The model employs queuing theory formulations where service time depends on conflict probability and clearance time for conflict zones. The model extends to multi-movement intersections through dependent and independent conflict zone networks and accommodates time-varying demand through dynamic parameter adaptation. Theoretical analysis reveals that equal inflows maximize delays due to peak conflict probabilities. Validation using real-world trajectory datasets demonstrates improvements over Highway Capacity Manual and Austroads methods across diverse scenarios. Furthermore, the proposed delay model achieves mean absolute errors of 4.6 to 10.9 s using simulation of signal-free intersections for AVs under first-come first-served and communication-free distributed control algorithm protocols.
Keywords
Signal-free junction; Stochastic modeling; Probability of conflict; Autonomous vehicles; Conflict networks; Queue theory